鸟群算法 Boids
Boids 鸟群算法,全称 brid-oid object,类鸟对象,最近偶然看到,感觉挺有意思的,简单的三条规则组成的系统,就能够模拟自然中大量动物的群聚行为,确实有其瑰丽所在。
从它的三条核心规则开始说起,克雷格·雷诺兹 Craig Reynolds 从观测群聚动物的过程中发现了群聚动物的行为有以下三个特征:
分离 (Separation): 移动以避免拥挤整个集体 (steer to avoid crowding local flockmates)
对齐 (Alignment): 朝着周围同伴移动的平均方向移动 (steer towards the average heading of local flockmates)
聚集 (Cohesion): 朝着周围同伴的平均位置(质心)移动 (steer to move toward the average position of local flockmates)
把这三条规则,具象为三条影响方向的向量,我们通过计算其每条向量对原速度的影响,就可以得出我们下一个时刻的速度。接下来,我们来一条条详细讲讲对应的实现以及其的数学原理。
行动规则
分离
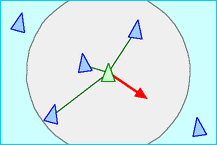
分离行为的目的是移动以避免拥挤整个集体,如果群体内的其他个体过于靠近自己(距离小于自己不爽的范围,下文称之为分离半径 SEPARATION_RADIUS),那么自己就要向着它的反方向进行移动
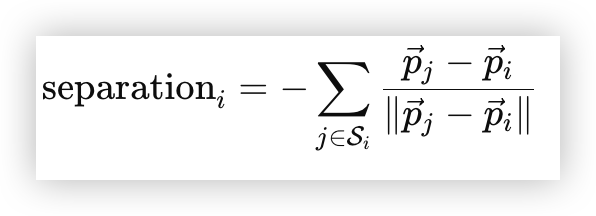
上述公式中,separation 代表的是分离的速度向量,而 Si 代表的则是在分离半径之内的邻居,pi 代表的则是每个个体的移动速度。
这样子我们可以很明确知道,距离越近,我们就会越远离对应的个体,反之,距离越远则影响越小。
对齐
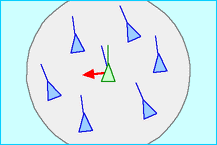
对齐行为的目的是让自己的速度靠近邻居速度的平均值,所以在我们观测得到的半径内,我们都会朝着观察得到的邻居的平均方向进行靠近
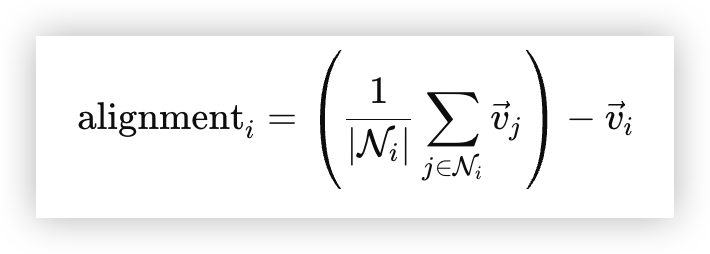
上述公式中,alignmenti 代表的是其平均移动方向向量,其实际上是计算观察半径内所有邻居移动的平均方向,减去当前速度,那么就是自身需要向群体对齐的移动方向。
聚集
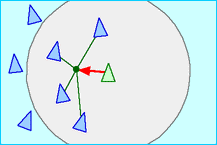
聚合行为的目的是靠近邻居的平均位置,所以,在观测半径内,自身就会朝着这些邻居的平均位置进行靠近
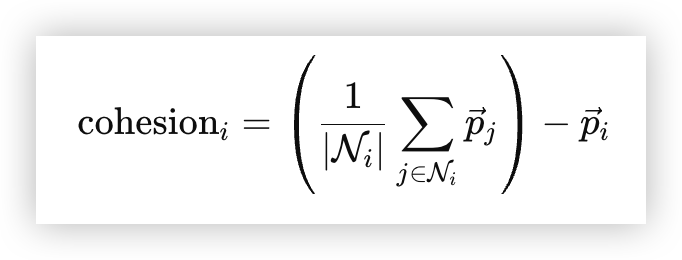
上述公式中,我们计算了观测半径内的邻居的质心,再将其减去自身位置,就可以得出自身聚集行为需要移动的对应向量。
参数
为控制每种行为对个体的影响,因此为每个行动规则都赋予对应的权值。所以有对应如下三个参数:
ALIGNMENT_WEIGHT
COHESION_WEIGHT
SEPARATION_WEIGHT
同时,还有每个个体的观测半径和分离半径:
NEIGHBOR_RADIUS
SEPARATION_RADIUS
最终,为了控制我们的画面,我们还需要规定画布的范围,以及我们所有个体的总数量,并且对每个个体的最大速度加以限制:
NUM_BOIDS
WIDTH, HEIGHT
MAX_SPEED
这样子,通过控制每个参数的行为,我们就可以在宏观上限制整个集体的一些行为。
结果展示
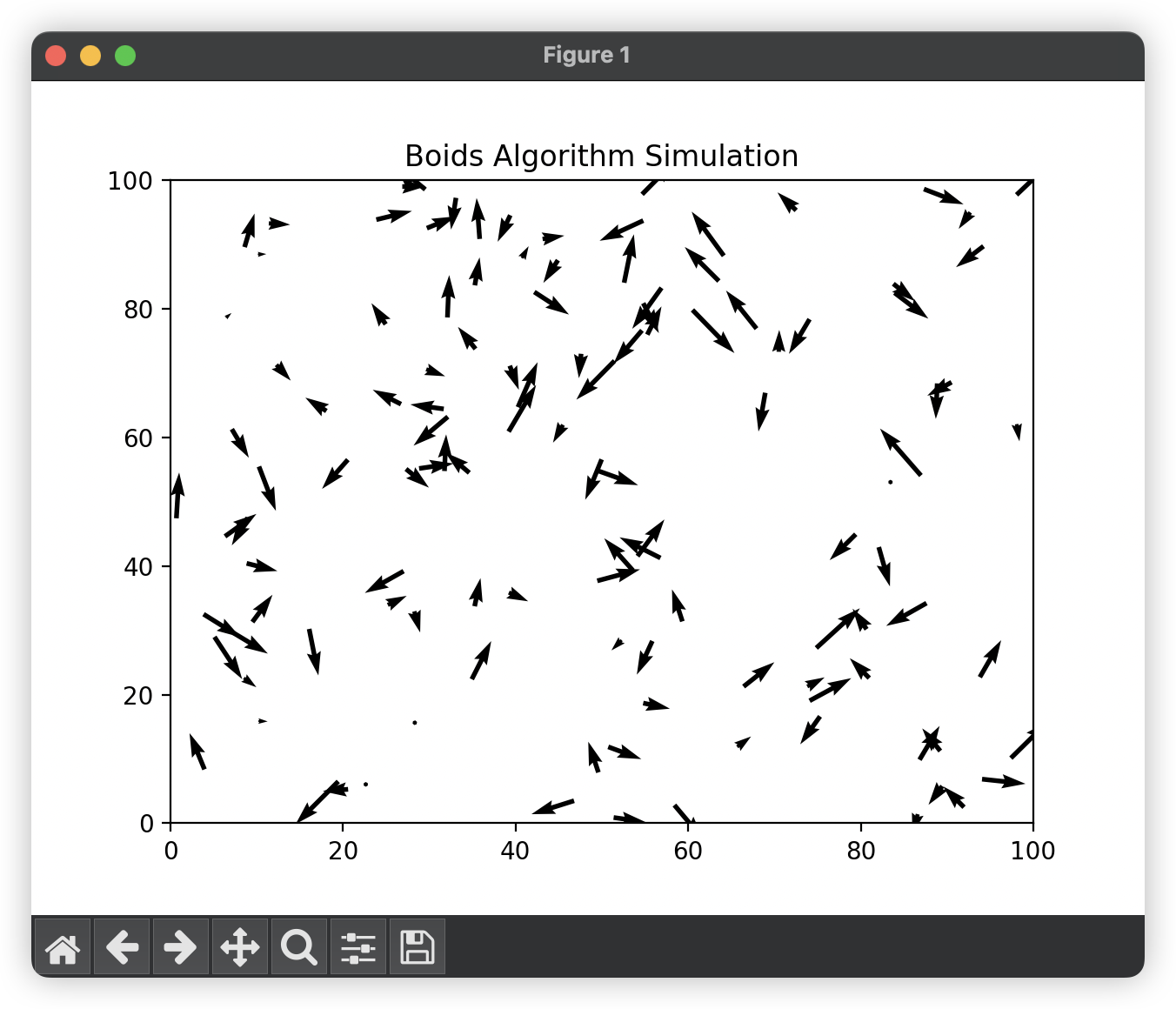
可以看到,上述的各个个体行为一开始都较为混乱
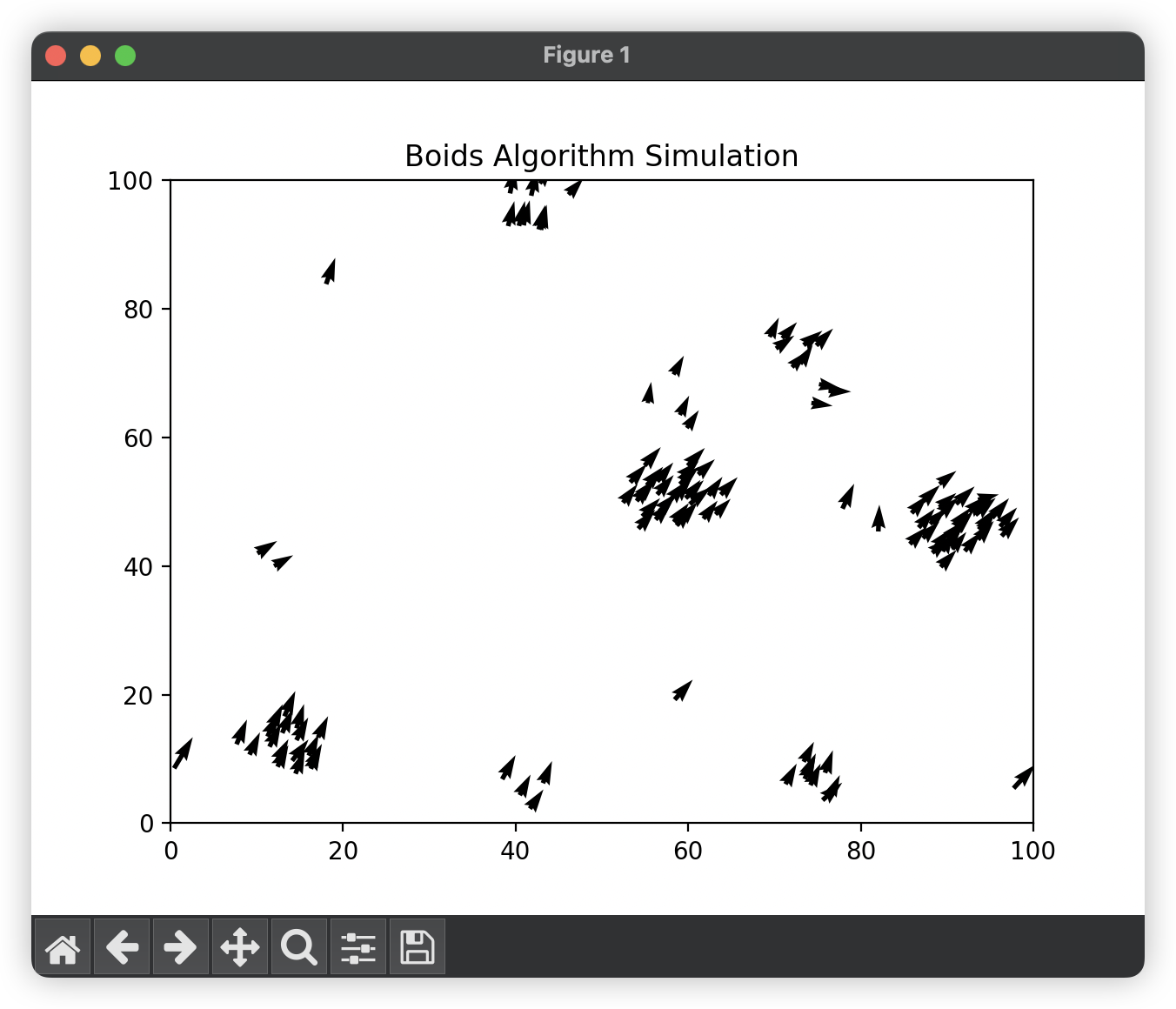
但随着时间的流逝,个体就逐渐被群体所裹挟着前进了。
代码参考
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
# 参数设置
NUM_BOIDS = 120
WIDTH, HEIGHT = 100, 100
MAX_SPEED = 30
NEIGHBOR_RADIUS = 10
SEPARATION_RADIUS = 4
ALIGNMENT_WEIGHT = 0.05
COHESION_WEIGHT = 0.01
SEPARATION_WEIGHT = 0.1
# 初始化 boids
positions = np.random.rand(NUM_BOIDS, 2) * [WIDTH, HEIGHT]
velocities = (np.random.rand(NUM_BOIDS, 2) - 0.5) * MAX_SPEED
def limit_speed(v, max_speed):
speed = np.linalg.norm(v)
if speed > max_speed:
return v / speed * max_speed
return v
def update_boids():
global positions, velocities
new_velocities = np.zeros_like(velocities)
for i in range(NUM_BOIDS):
pos_i = positions[i]
vel_i = velocities[i]
# 初始化三个行为向量
# 方向对齐
alignment = np.zeros(2)
# 群体聚合
cohesion = np.zeros(2)
# 保持距离
separation = np.zeros(2)
count = 0
# 计算邻居的影响
for j in range(NUM_BOIDS):
if i == j:
continue
offset = positions[j] - pos_i
distance = np.linalg.norm(offset)
if distance < NEIGHBOR_RADIUS:
alignment += velocities[j]
cohesion += positions[j]
if distance < SEPARATION_RADIUS:
separation -= offset / distance
count += 1
if count > 0:
alignment = alignment / count - vel_i
cohesion = cohesion / count - pos_i
vel_i += ALIGNMENT_WEIGHT * alignment
vel_i += COHESION_WEIGHT * cohesion
vel_i += SEPARATION_WEIGHT * separation
vel_i = limit_speed(vel_i, MAX_SPEED)
new_velocities[i] = vel_i
positions[:] = (positions + new_velocities) % [WIDTH, HEIGHT]
velocities[:] = new_velocities
fig, ax = plt.subplots()
ax.set_xlim(0, WIDTH)
ax.set_ylim(0, HEIGHT)
ax.set_title("Boids Algorithm Simulation")
quiver = ax.quiver(positions[:, 0], positions[:, 1], velocities[:, 0],
velocities[:, 1])
def animate(frame):
update_boids()
# 更新
quiver.set_offsets(positions)
quiver.set_UVC(velocities[:, 0], velocities[:, 1])
return quiver,
ani = FuncAnimation(fig, animate, frames=100, interval=100, blit=True)
plt.show()